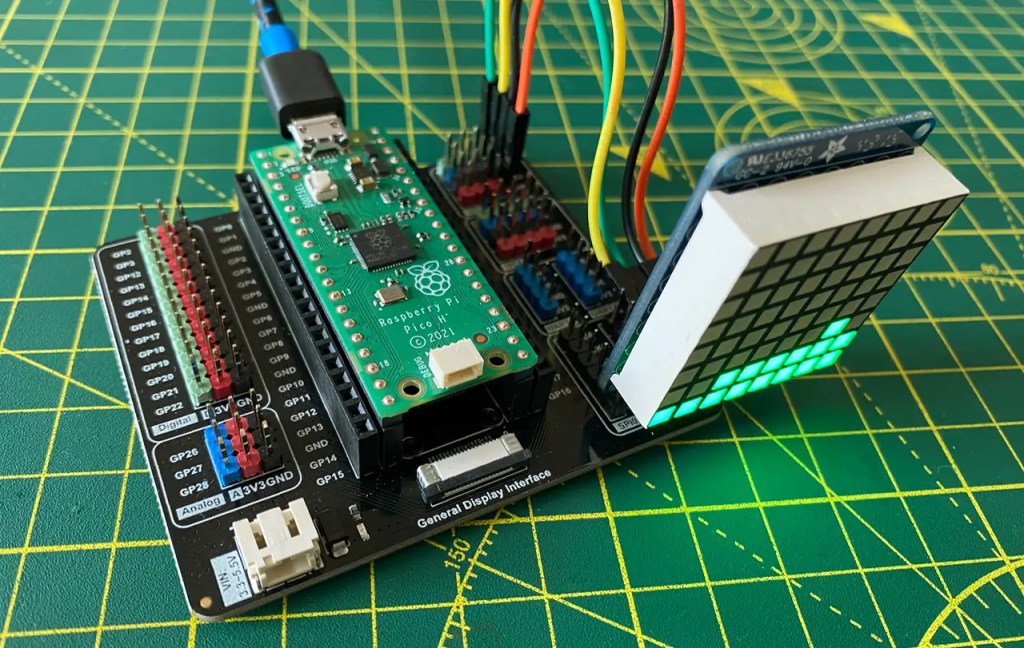
I keep an eye out for Raspberry Pi Pico add-ons that make prototyping easier and do so inexpensively. DFRobot’s Pico Gravity Board is one such. It breaks out a stack of RP2040 GPIOs and buses to make it more straightforward to hook up displays, sensors and such.